Robots
-
Test code
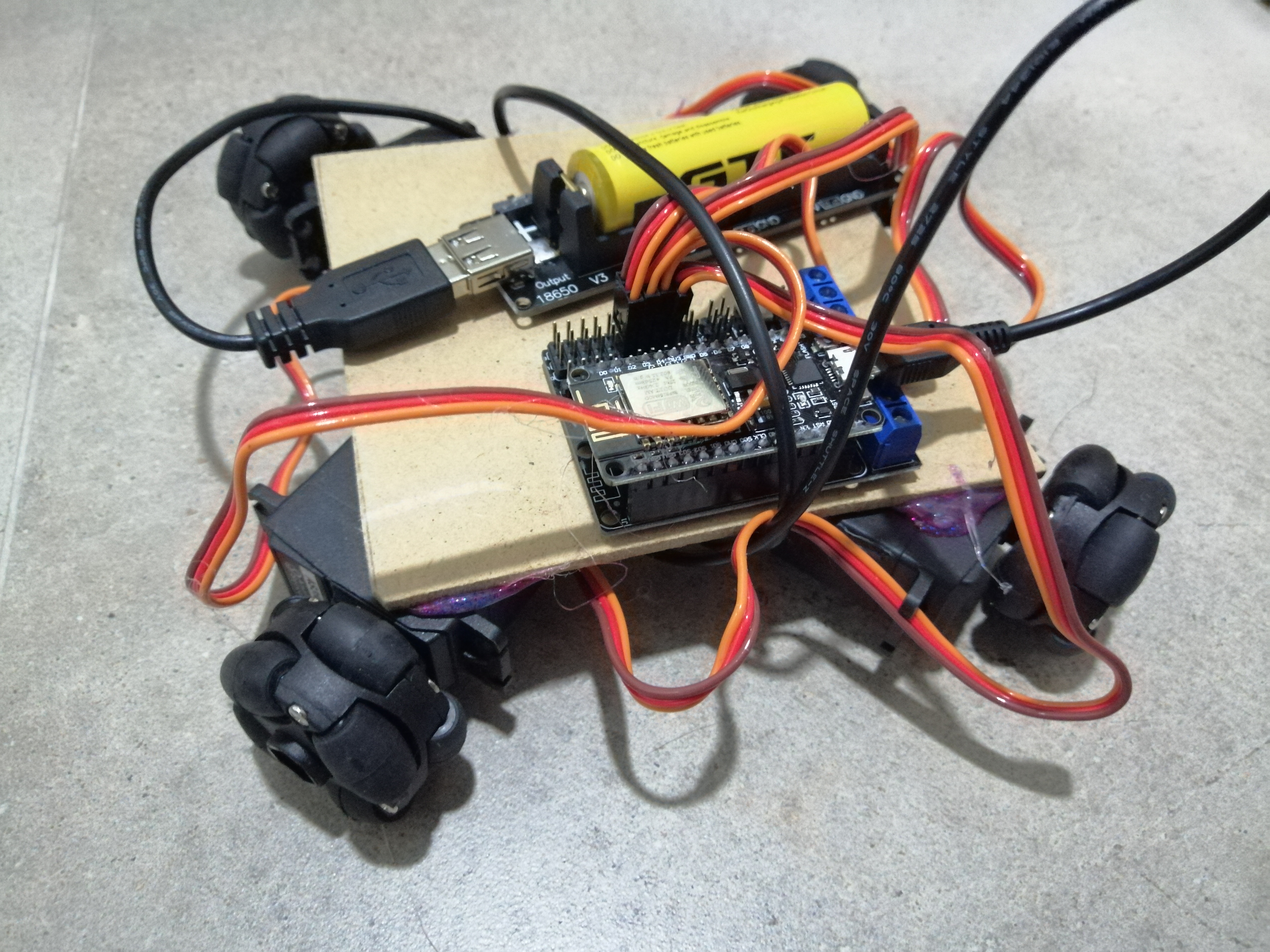
Servos en pines D5, D6, D7, D8.
//servoMotor1 y servoMotor4 (frontales, izquierdo y derecho)
//servoMotor2 y servoMotor3 (traseros, izquierdo y derecho)
Usa 4 servos de rotación continua
.
Usa 2 motores DC
.
(To Be Done)
Usa 2 servos de rotación continua
.
(To Be Done)
Usa 2 motores de Lego NXT
.
(To Be Done)

(To Be Done)
Las diferentes configuraciones usan distintos tipos de locomoción en robots móviles