Hardware
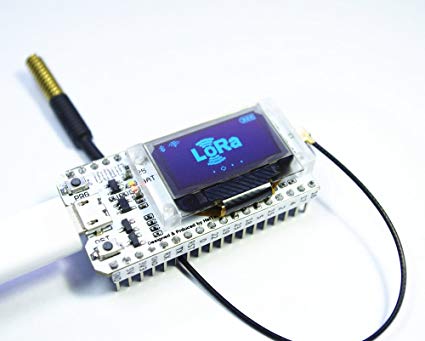
| Wemos D1 mini | NodeMCU | Heltec LoRa |
|---|---|---|
 |
 |
 |
| TTGO Camera | ESP8266 Deauther |
|---|---|
 |
 |
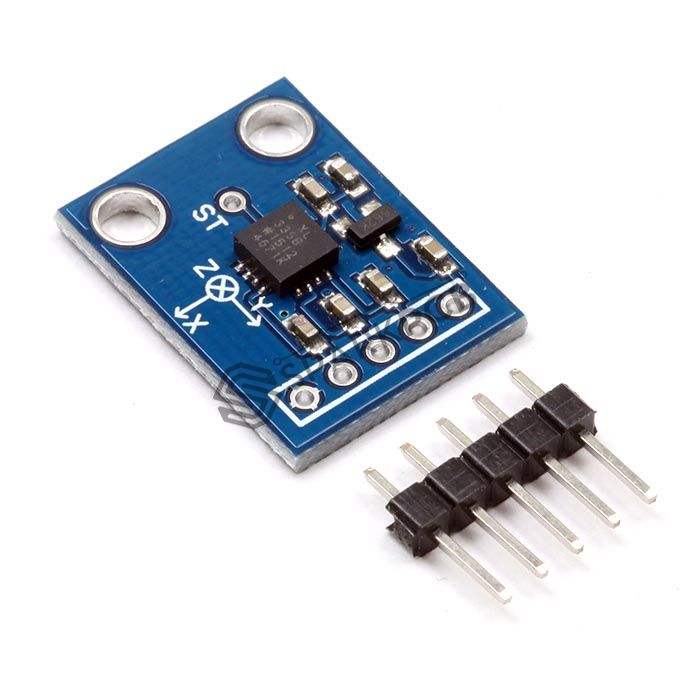
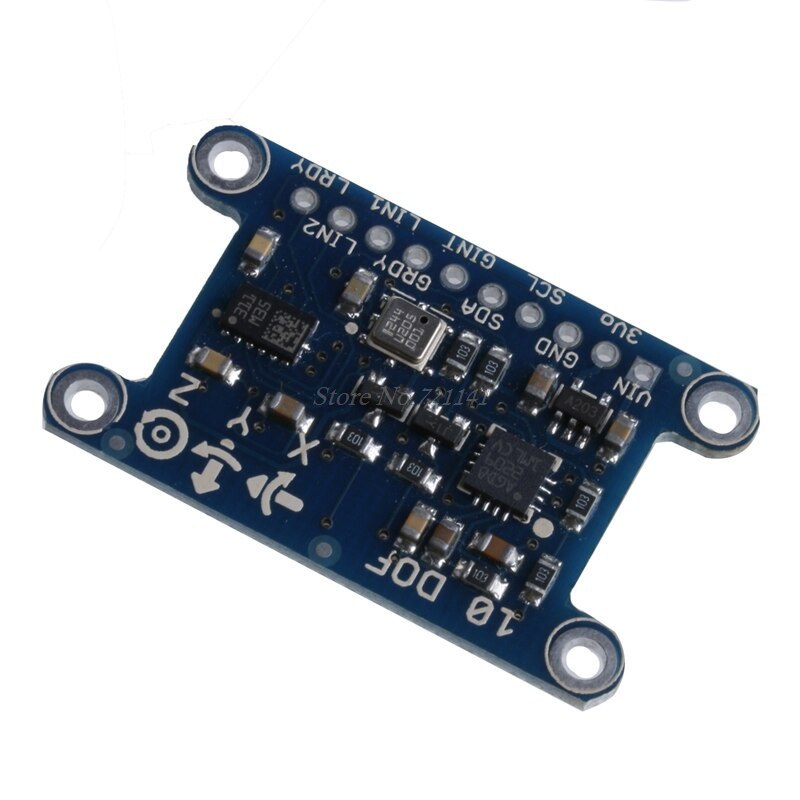
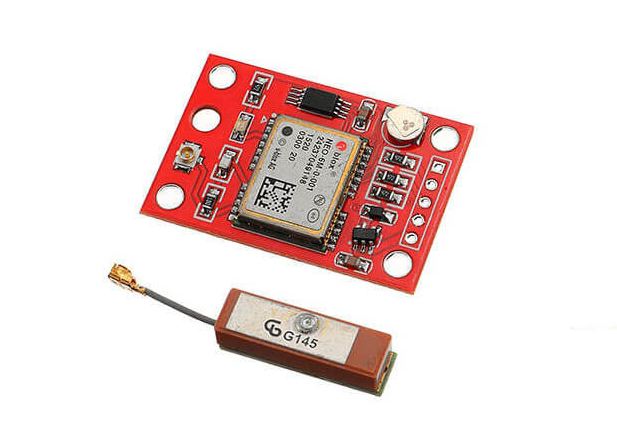
| Acelerómetro GY-61 | IMU (Accel., Giro., Magnet.) | GPS NEO-6M GY-GPS6MV2 |
|---|---|---|
 |
 |
 |
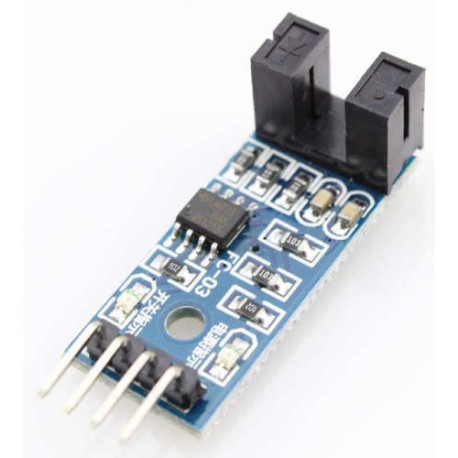
| Tacómetro | Brújula GY-273 |
|---|---|
 |
 |
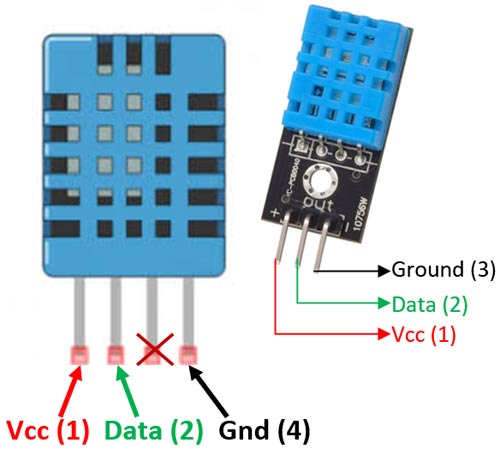
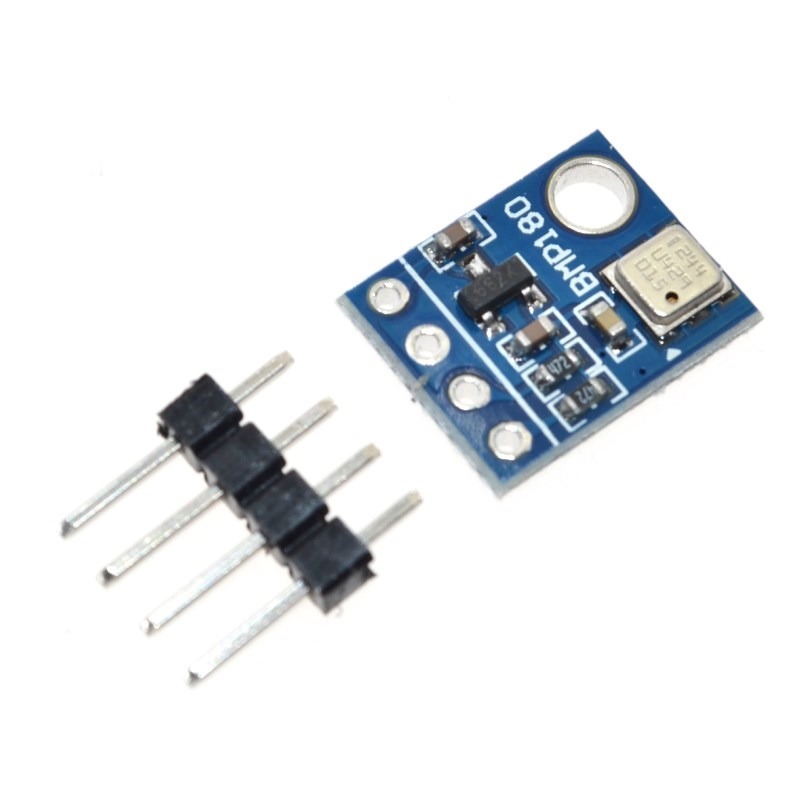
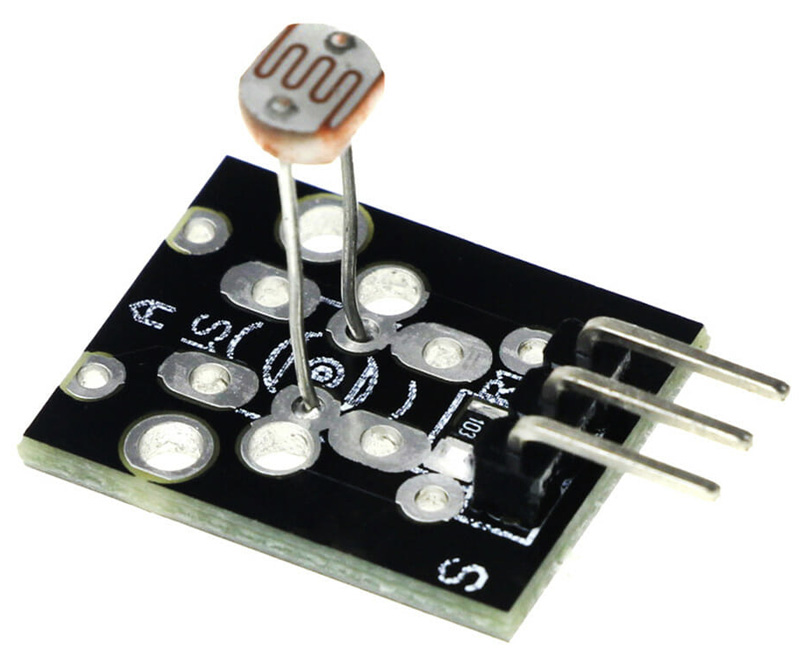
| DHT11 | Sensor barométrico BMP180 | LDR Keyes K-018 |
|---|---|---|
 |
 |
 |
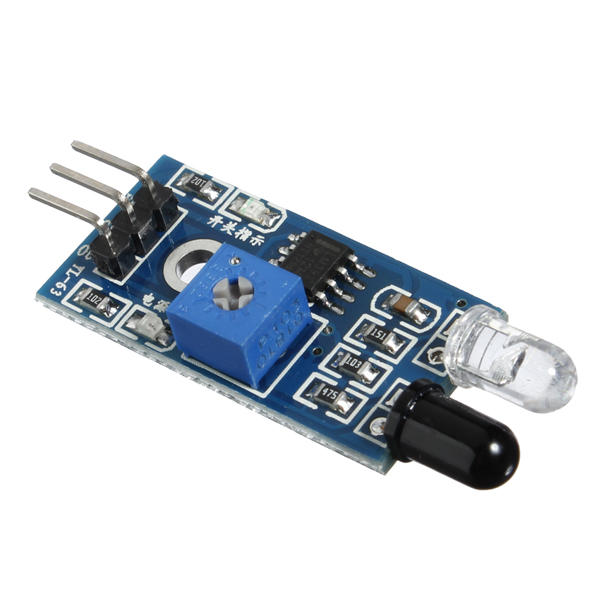
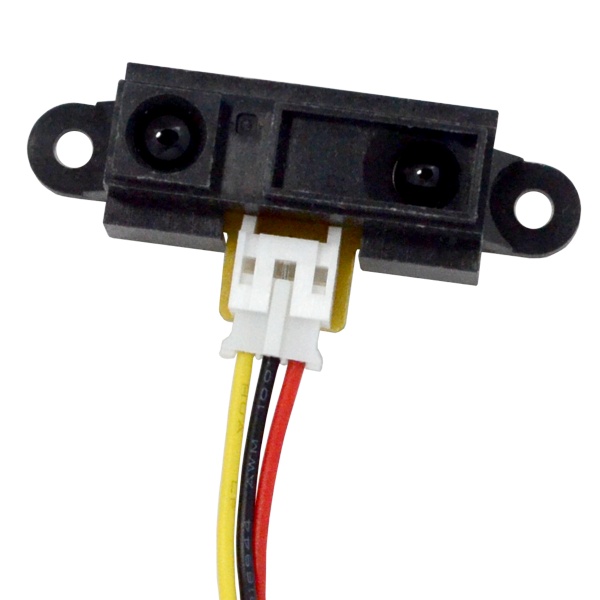
| Sensor de distancia HCSR04 | Detector obstáculos infrarrojo YL63 | Sensor de distancia SHARP |
|---|---|---|
 |
 |
 |
| Láser Lidar 2D |
|---|
 |
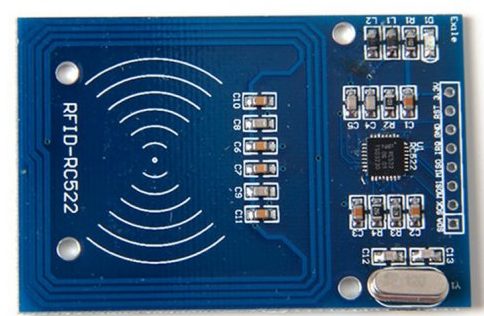
| Joystick analógico | RFID RC522 | Botón-pulsador |
|---|---|---|
 |
 |
 |
| Leds RGB WS2811 | Led superlumínico Keyestudio |
|---|---|
 |
 |
| OLED 0.96" | Buzzer o Zumbador |
|---|---|
 |
 |
| Servo SG90 | Servo de rotación continua FS90R | Motor DC (y puentes H) |
|---|---|---|
 |
 |
 |
| Motor Lego NXT |
|---|
 |
Y de Robots: