Locomoción en robots móviles
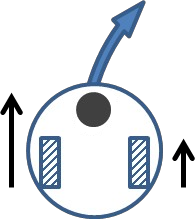
- Diferencial Clástico
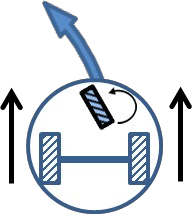
- Triciclo
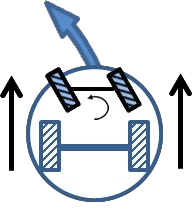
- Ackerman
- Skid Steer
- Caterpillar u oruga
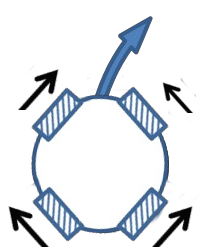
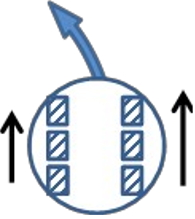
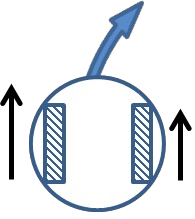
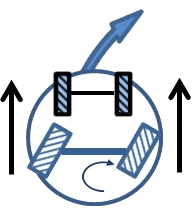
- Síncrono
- Omnidireccional de 3 ruedas
- Omnidireccional de 4 ruedas
Usa dos motores independientes. Asignando distintas velocidades a cada unoconseguimos el movimiento del robot. Odometría descrita aquí.
Disponde de una rueda delantera direccional y dos ruedas motrices traseras síncronas.
Similar al triciclo, pero con dos ruedas directrices.
Mismo planteamiento para la odometría que el robot diferencial (ver aquí), pero tomando como distancia entre las ruedas la diagonal máxima entre las ruedas dispuestas. Todas las ruedas en el mismo lateral deben ir con la misma velocidad.
Mismo planteamiento para la odometría que el robot diferencial (ver aquí), pero tomando como distancia entre las ruedas la diagonal máxima entre las orugas. Se trata de dos únicas ruedas pero con orugas similar a un tanque.
Las dos ruedas motrices ejercen a la vez de directrices.
Usa ruedas omnidireccionales o suecas.
| Rodillos rectos | Rodillos inclinados |
|---|---|
|
|