Buzzer

Con este actuador podemos reproducir tonos.
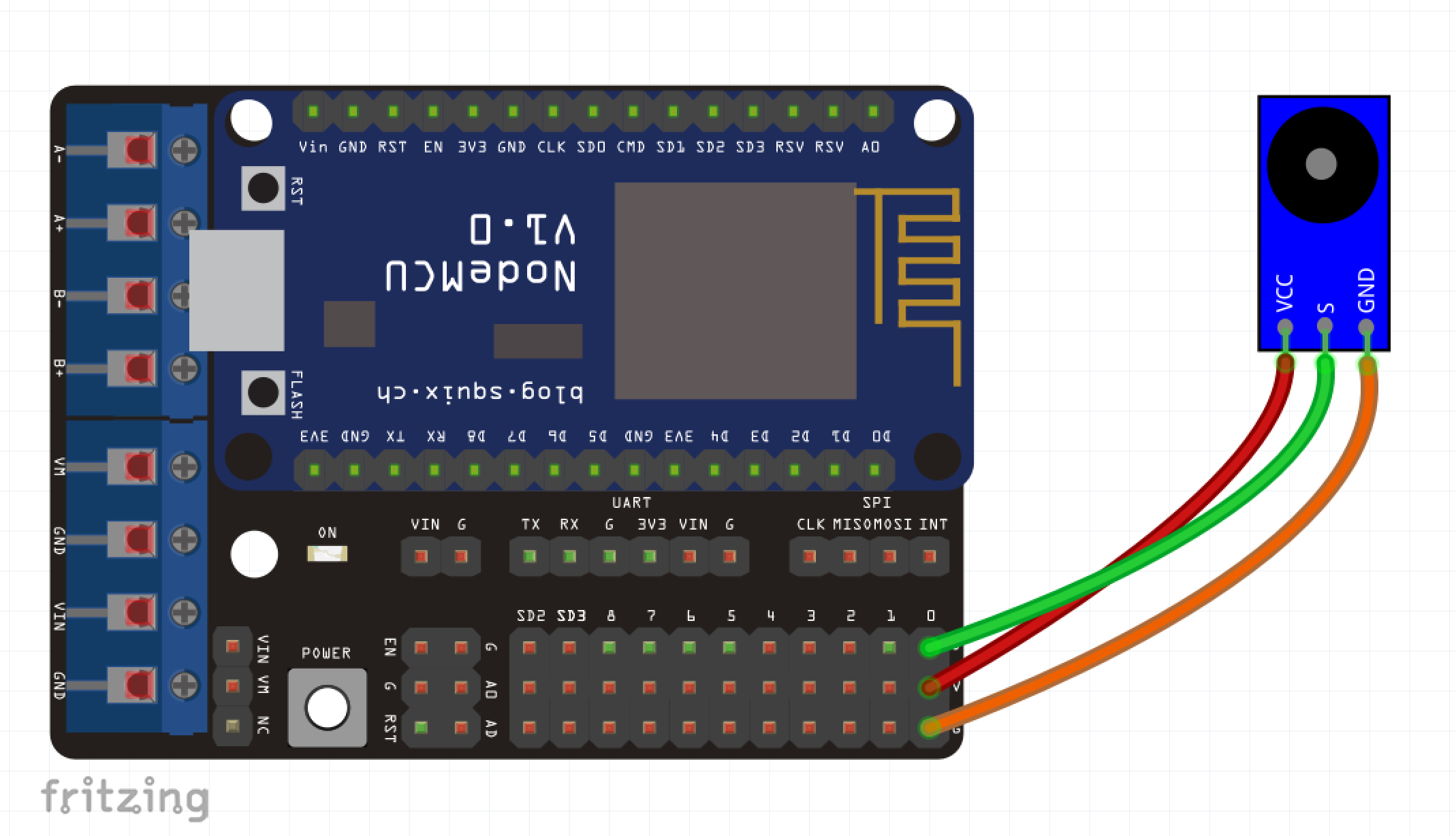
const int pinBuzzer = D0;
void setup()
{
}
void loop()
{
//generar tono de 440Hz durante 1000 ms
tone(pinBuzzer, 440);
delay(1000);
//detener tono durante 500ms
noTone(pinBuzzer);
delay(500);
//generar tono de 523Hz durante 500ms, y detenerlo durante 500ms.
tone(pinBuzzer, 523, 300);
delay(500);
}
#define c3 7634
#define d3 6803
#define e3 6061
#define f3 5714
#define g3 5102
#define a3 4545
#define b3 4049
#define c4 3816 // 261 Hz
#define d4 3401 // 294 Hz
#define e4 3030 // 329 Hz
#define f4 2865 // 349 Hz
#define g4 2551 // 392 Hz
#define a4 2272 // 440 Hz
#define a4s 2146
#define b4 2028 // 493 Hz
#define c5 1912 // 523 Hz
#define d5 1706
#define d5s 1608
#define e5 1517 // 659 Hz
#define f5 1433 // 698 Hz
#define g5 1276
#define a5 1136
#define a5s 1073
#define b5 1012
#define c6 955
#define R 0 // Define a special note, ‘R’, to represent a rest
// Melody 1: Star Wars Imperial March
int melody1[] = { a4, R, a4, R, a4, R, f4, R, c5, R, a4, R, f4, R, c5, R, a4, R, e5, R, e5, R, e5, R, f5, R, c5, R, g5, R, f5, R, c5, R, a4, R};
int beats1[] = { 50, 20, 50, 20, 50, 20, 40, 5, 20, 5, 60, 10, 40, 5, 20, 5, 60, 80, 50, 20, 50, 20, 50, 20, 40, 5, 20, 5, 60, 10, 40, 5, 20, 5, 60, 40};
// Melody 2: Star Wars Theme
int melody2[] = { f4, f4, f4, a4s, f5, d5s, d5, c5, a5s, f5, d5s, d5, c5, a5s, f5, d5s, d5, d5s, c5};
int beats2[] = { 21, 21, 21, 128, 128, 21, 21, 21, 128, 64, 21, 21, 21, 128, 64, 21, 21, 21, 128 };
int MAX_COUNT = sizeof(melody1) / 2;
long tempo = 10000;
int pause = 1000;
int rest_count = 50;
int toneM = 0;
int beat = 0;
long duration = 0;
int potVal = 0;
int speakerOut = D0;
int led = 6;
void setup() {
pinMode(speakerOut, OUTPUT);
pinMode(led, OUTPUT);
Serial.begin(9600);
}
void loop() {
// Melody1
for (int i=0; i<MAX_COUNT; i++) {
toneM = melody1[i];
beat = beats1[i];
duration = beat * tempo;
playTone();
delayMicroseconds(pause);
}
// Melody2
MAX_COUNT = sizeof(melody2) / 2;
for (int i = 0; i < MAX_COUNT; i++) {
toneM = melody2[i];
beat = beats2[i];
duration = beat * tempo;
playTone();
delayMicroseconds(pause);
}
}
void playTone() {
long elapsed_time = 0;
if (toneM > 0) {
digitalWrite(led,HIGH);
while (elapsed_time < duration) {
digitalWrite(speakerOut,HIGH);
delayMicroseconds(toneM / 2);
digitalWrite(speakerOut, LOW);
delayMicroseconds(toneM / 2);
elapsed_time += (toneM);
}
digitalWrite(led,LOW);
}
else {
for (int j = 0; j < rest_count; j++) {
delayMicroseconds(duration);
}
}
}