Info_Showcases
ROS# helps you to...
-
...communicate with ROS from within your Windows Application.
Subscribe and publish topics, call and advertise services, set and get parameters and use all features provided by rosbridge_suite.
-
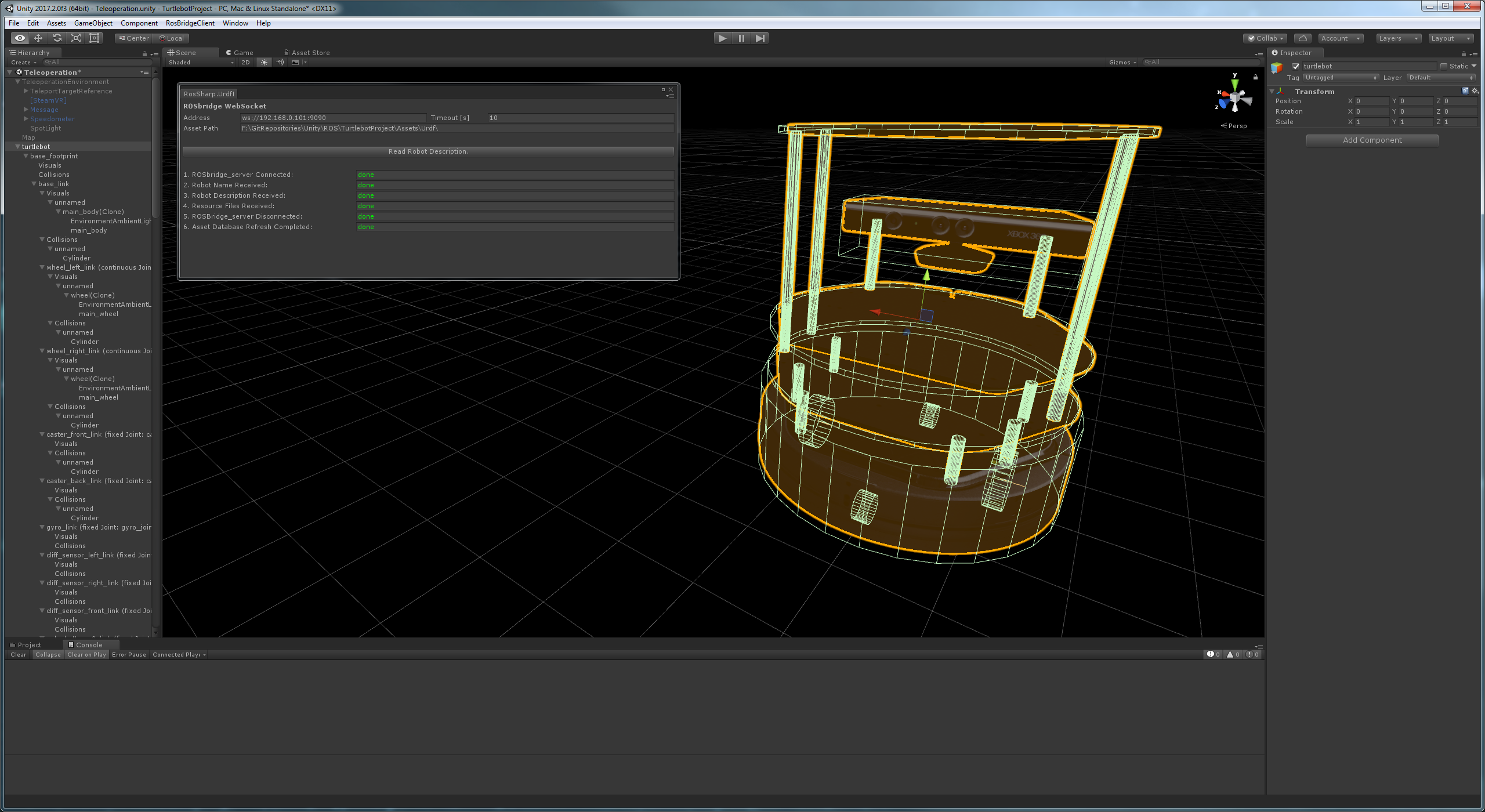
...import your robot's URDF model as a Gameobject in Unity (video*).
Import the data either directly from the ROS system using the robot_description service or via a URDF file that you copied into your Unity Asset folder.
-
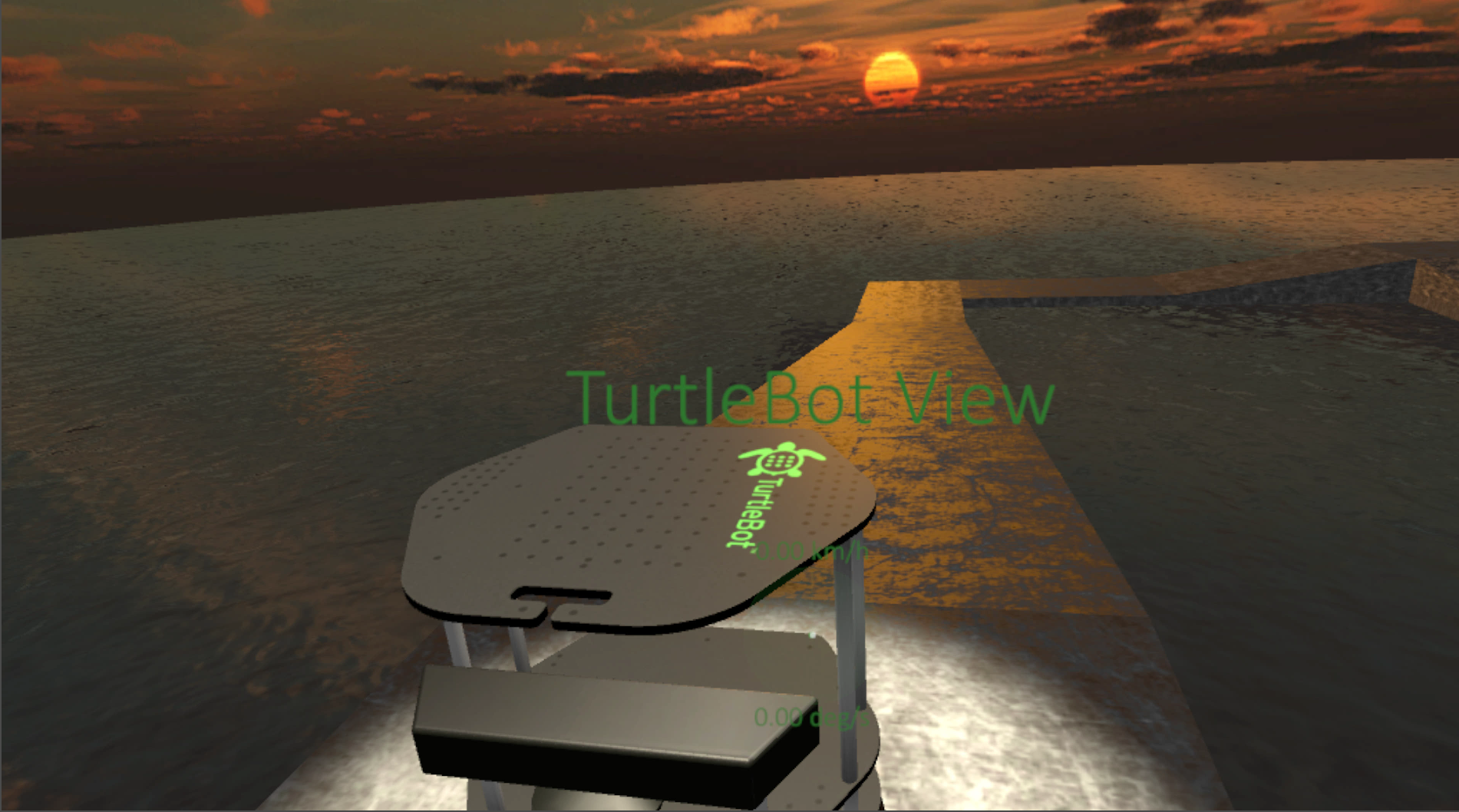
...control your real Robot via Unity (video*)
-
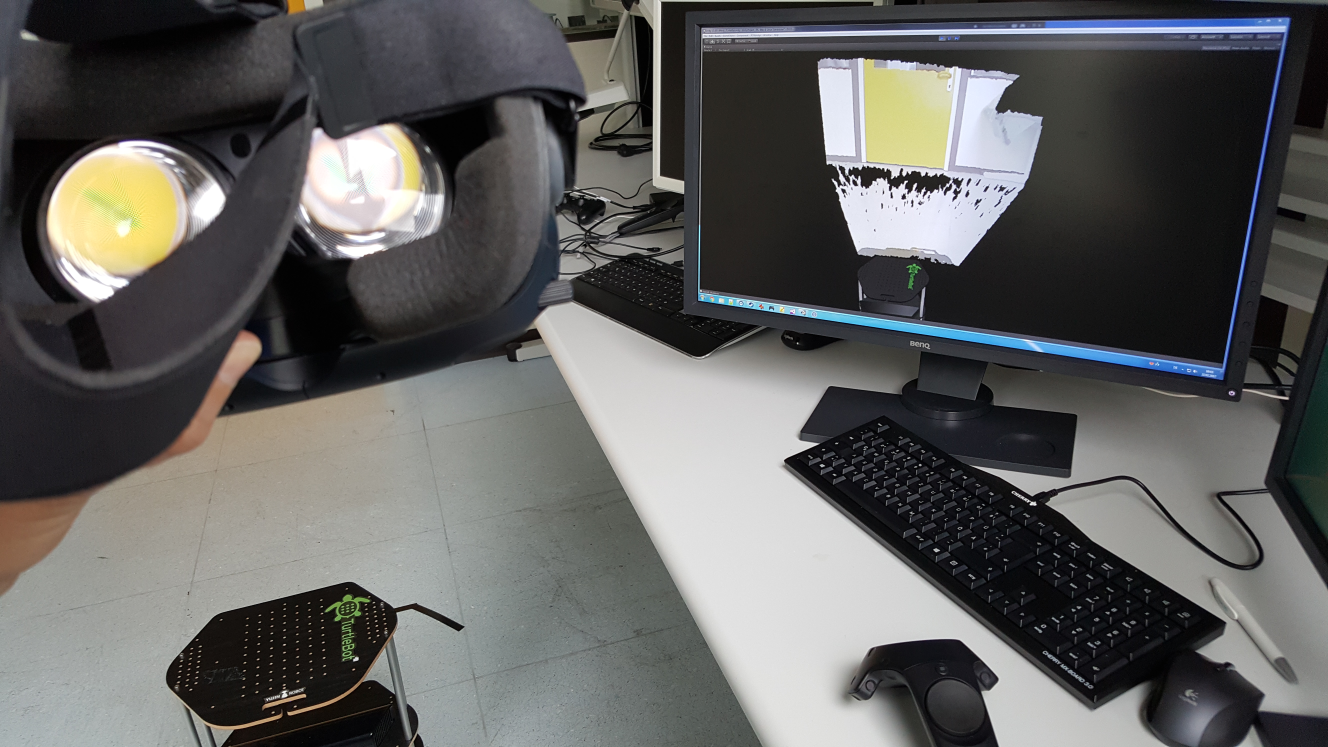
...visualize your robot's actual state and sensor data in Unity (video*).
-
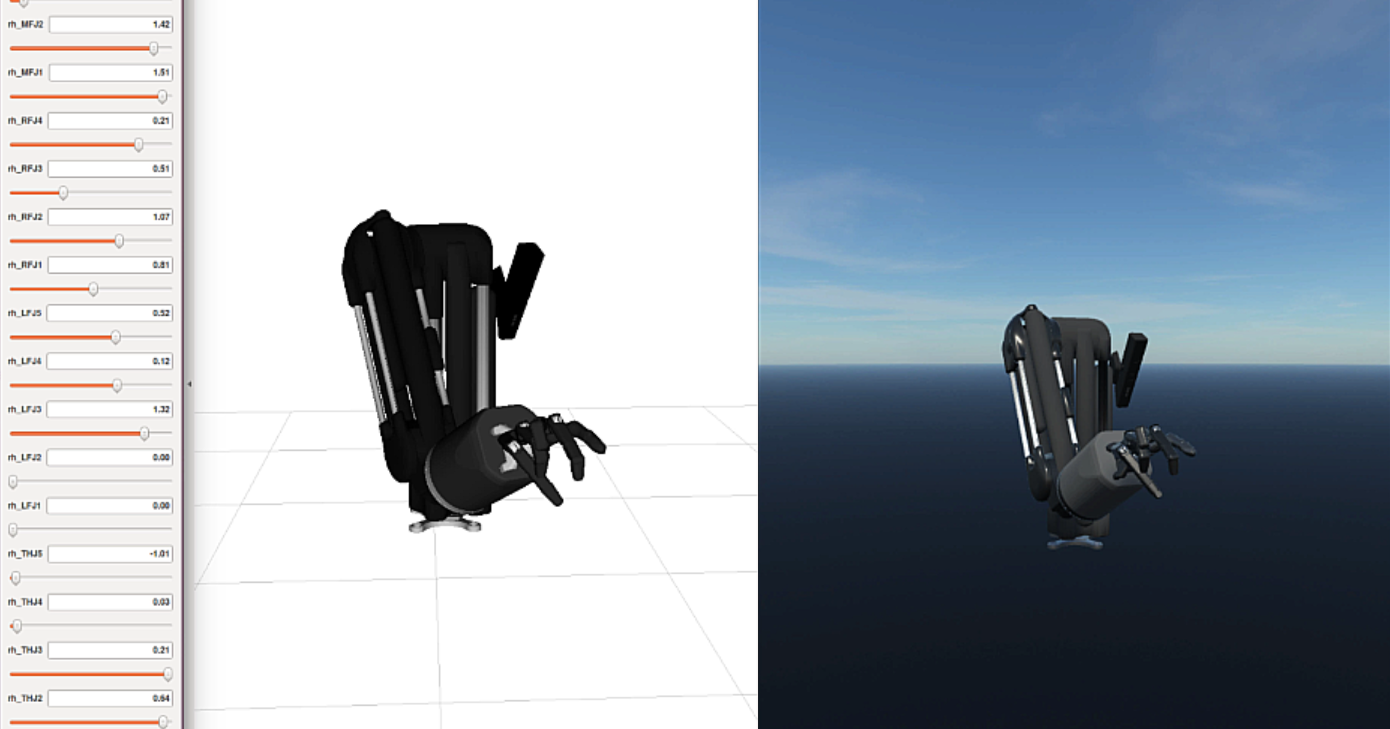
...simulate your robot in Unity with the data provided by the URDF and without using a connection to ROS. Beside visual components as meshes and textures, also joint parameters and masses, centers of mass, inertia and collider specifications of rigid bodies are imported and used for the physical simulation in Unity (video*).
-
...train neural networks e.g. in combination with Unity's ML Agents (video*).

- ...and much more! ROS# is useful for a wide variety of applications. Think about Human-Machine Interaction, Teleoperation, Virtual Prototyping, Virtual Commissioning, Robot Fleet Operation, Gaming and Entertainment!
* Note: these videos are meant only as a showcase of what is possible with ROS#. Please do not follow them as a tutorial, since they may not use the most recent version of ROS#, and/or may use custom scripts that are not included in ROS#.
© Siemens AG, 2017-2024