Repositório destinado ao trabalho da matéria de robótica da Fga.

1. Serão 5 entregas semanais nas quinta-feira 23h59, a partir da semana 8 (16/05/23). Atraso acarretará em desconto de 10% por dia de atraso.
2. Cada entrega será feita no GitHub e deve conter
2.1. Código tipo "demo" - só baixar e rodar
2.2. vídeo do robô executando a demo - subir no youtube e colocar o link
2.3. documentação: descrição da demo na própria página do GitHub (markdown)
3. Apresentação oral no retorno do professor
1. Criar uma apresentação para cada entrega;
2. Ao menos duas com interações com usuários via sensores do robô;
Carlos Eduardo Leite de Oliveira - 170007707
Breno Linhares de Sousa - 170007057
Haniel Rodrigues Guimaraes de Lima – 150036558
Vitor Rangel de Aquino Silva – 170064107
Felipe Costa Gomes - 190012757
Para o primeiro projeto o grupo escolheu realizar as tarefas no Robô NAO e a programação foi realizada no softwre Coreography 2.8.6.23 disponível em: https://www.aldebaran.com/en/support/nao-6/downloads-softwares.
A primeira tarefa desenvolvida pelo grupo foi fazer o NAO ouvir e reconhecer palavras em português e realizar diferentes ações de acordo com a palavra pronuciada como Sentar, Levantar, Falar e Pegar. Especificamente na ação Pegar o NAO procura uma bola vermelha e anda até a bola e na ação Falar o NAO emita o latido de um cachorro.
Para a implementação dessa atividade no NAO foram utilizados os microfones, alto falantes e câmera do NAO para o reconhecimento da fala, para reprodução da fala e para o processamento de imagem para detecção da bola vermelha, além de outros sensores e atuadores como motores de passo e giroscópios para o movimento das juntas do robô. A imagem abaixo detalha melhor a localização dos microfones e a câmera presente nos olhos.

O vídeo mostrando os testes do programa implementado pelo Grupo pode ser acessado pelo seguinte link: https://www.youtube.com/watch?v=vUP44cZrWn8&ab_channel=BrenoLinhares
VÍDEO NOVO COM MOVIMENTO DE CHUTE DA BOLA: https://www.youtube.com/watch?v=Wq4ho7nGxtk
A figura abaixo mostra o diagrama de blocos montado no software coreography. O diagrama realiza as seguintes tarefas:
- Reconhecer a palavra pronuciada - implementada pelo bloco "SPEECH RECO" ;
- Utilizar um swich case para selecionar entre as palavras "Senta", "Levanta", "Late" e "Pega";
- Dependendo da palavra reconhecida o NAO realiza a respectiva ação;
- Primeira ação Sentar - implementada pelo bloco "SIT DOW";
- Segunda ação Levantar - Implementada pelo bloco "STAND UP";
- Terceira ação Latir - Implementada pelo bloco "SAY" configurado para reproduzir o texto "AU AU AU AU";
- Quarta ação reconhecer e caminhar até a bola - Implementada pelos blocos "RED BALL TRACKER" e "MOVE TO"
- Por último ao Detectar e chegar próximo a bola é carregado o bloco do código em PYTHON com os parâmetros de movimento para a realização do chute da bola
Todas as saídas dos blocos de ação são realimentados ao bloco "SPEECH RECO" para que o NAO possa reconhecer novas palavras após terminar de realizar a ação atual.

OBS: No bloco "SPEECH RECO" foi configurado um threshold de 40 como sensibilidade para reconhecimento dos padrões da fala.
O Código implementado pode ser acessado na pasta Projeto_1 deste repositório.
O NOVO CÓDIGO IMPEMENTADO INCLUINDO AÇÃO DE ENCONTRAR E MOVIMENTO DE CHUTE DA BOLA PODE SER ACESSADO NA PASTA:Projeto_1_NOVO
Para o segundo projeto o grupo escolheu realizar as tarefas no Robô NAO e a programação foi realizada no softwre Coreography 2.8.6.23 disponível em: https://www.aldebaran.com/en/support/nao-6/downloads-softwares.
A segunda tarefa desenvolvida pelo grupo foi fazer o NAO ouvir, reconhecer palavras em português e realizar diferentes exercícios de acordo com a palavra pronuciada. Quando há a detecção de um comando válido, o NAO responde com o nome do exercicio a ser executado, e uma demonstração do mesmo.
Para a implementação dessa atividade no NAO foram utilizados os microfones e alto falantes do NAO além de outros sensores e atuadores como motores de passo e giroscópios para o movimento das juntas do robô. A imagem abaixo detalha melhor a localização dos microfones .
O vídeo mostrando os testes do programa implementado pelo Grupo pode ser acessado pelo seguinte link: ALTERAR LINK https://www.youtube.com/watch?v=vUP44cZrWn8&ab_channel=BrenoLinhares
As figuras abaixo mostram os diagramas de blocos montados no software coreography. O diagrama principal é iniciado com um "Setup" para definir os parâmetros iniciais do NAO, em seguida o diagrama "StartCond" que realiza as seguintes tarefas:
- Reconhecer a palavra pronuciada - implementada pelo bloco "SPEECH RECO" ;
- Utilizar um swich case para selecionar entre as palavras "Iniciar" e "Aguarde";
- Dependendo da palavra reconhecida o NAO solicita qual exercicio seja demonstrado;
Após o diagrama "StartCond" o NAO ira solicitar a escolha de um dos três exercícios para demonstração, o usuário poderá escolher falando "Primeiro", "Segundo" ou "Terceiro", sendo eles:
- Agachamento;
- Rosca com Halter;
- Flexões;
Todas as saídas dos blocos de ação são realimentados ao bloco "SPEECH RECO" para que o NAO possa reconhecer novas palavras após terminar de realizar a ação atual.

OBS: No bloco "SPEECH RECO" foi configurado um threshold de 40 como sensibilidade para reconhecimento dos padrões da fala.
O Código implementado pode ser acessado na pasta Projeto_2 deste repositório.
Para o terceiro projeto o grupo escolheu realizar as tarefas no Robô NAO e a programação foi realizada no softwre Coreography 2.8.6.23 disponível em: https://www.aldebaran.com/en/support/nao-6/downloads-softwares.
A terceira tarefa desenvolvida pelo grupo foi fazer o NAO reconhecer, aprender e armazenar as faces dos integrantes do grupo. A partir do armazenamento do rosto do integrante o NAO consegue reconhecer a respectiva face através dos blocos "Learn Face" e "Switch Case" e, após o toque no sensor de cabeça frontal do NAO ele reconhece falando a seguinte frase "Bom dia Carlos", por exemplo.
Para a implementação dessa atividade no NAO foram utilizados o alto falante, câmera e o sensor da cabeça frontal. Na figura abaixo é apresentado todos os sensores do NAO e os utilizados para este projeto.

O vídeo mostrando os testes do programa implementado pelo Grupo pode ser acessado pelo seguinte link: https://www.youtube.com/watch?v=osMQio_8DwU
Como visto no diagrama do blocos abaixo, é necessário primeiro usar o bloco "Learn Face" para salvar os rostos dos integrantes do grupo, caso contrário, o NAO não poderá reconhecê-los. Em sequência, ao iniciar o programa, o reconhecimento facial é iniciado após os diagramas de "Setup" e "Start Condition". Após o reconhecimento facial, o bloco "Raise Event" é ativada para que você possa repetir o processo novamente.

A estrutura do diagrama "Setup" é:
- Use o bbloco "Stand Up"
- Ative apenas os parâmetros "Autonomous Blinking" e "Background Movement" no bloco "Autonomous Abilities" e desative os outros três.

A estrutura do diagrama "Start Condition" é:
- Defina o texto do bloco "Text Edit" à esquerda para algo como "Toque no sensor frontal da minha cabeça se quiser que eu reconheça rostos famosos".
- Defina o texto do bloco "Text Edit" à direita para algo como "Ok, por favor, segure um rosto famoso na minha frente".

O diagrama "Facial Recognition" é apresentado abaixo, contendo o bloco "switch Case" como o principal para reconhcer a face do integrante.

O Código implementado pode ser acessado na pasta PROJETO_3 deste repositório.
No quarto projeto o grupo escolheu realizar duas performance musicais no Robô NAO e a programação foi realizada no software Coreography 2.8.6.23 disponível em: https://www.aldebaran.com/en/support/nao-6/downloads-softwares.
O quarto projeto desenvolvido pelo grupo foi fazer o NAO ouvir, reconhecer palavras em português e realizar performance musicais de acordo com a palavra pronuciada. Quando há a detecção de um comando válido, o NAO começa a fazer sua performance ao som de uma musica do instrumento de sua apresentação.
Para a implementação dessa atividade no NAO foram utilizados os microfones para a captação dos comandos a serem realizados e os alto falantes do NAO para reproduzir as musicas e falas do NAO além de outros sensores e atuadores como motores de passo e giroscópios para o movimento das juntas do robô. Assim com já foi esclarecido nos projetos acima. A intenção neste projeto é fazer um pouco de entretenimento por meio de performance musicais do NAO
O vídeo mostrando os testes do programa implementado pelo Grupo pode ser acessado pelo seguinte link: (https://www.youtube.com/watch?v=dMhk7Ilo50A)
As figuras abaixo mostram os diagramas de blocos montados no software coreography. O diagrama principal é iniciado com uma "Posição Inicial" seguida de um diagrama para o NAO comprimentar com um "oi" esperando no bloco "SPEECH RECO" para realizar as seguintes performance:
- A palavra "Musica" quando o NAO a reconhecer ativa o comando de voz seguido de um performance do NAO tocando guitarra; 2.A palavra "Outra" quando o NAO a reconhecer ativa outra fala seguida de uma performance do NAO tocando saxofone;
Após o diagrama da guitarra o NAO faz um agradecimento retorna a posição de espera para um comando, se ele faz o diagrama do saxofone a programação é encerrada.

OBS: No bloco "SPEECH RECO" foi configurado um threshold de 43 como sensibilidade para reconhecimento dos padrões da fala.
O Código implementado pode ser acessado na pasta Projeto_4 deste repositório.
Para o quinto projeto o grupo escolheu realizar as tarefas no Robô NAO e a programação foi realizada no softwre Coreography 2.8.6.23 disponível em: https://www.aldebaran.com/en/support/nao-6/downloads-softwares.
O quinto projeto desenvolvido pelo grupo foi fazer o NAO dançar a musica "Thriller" do Michael Jackson e se comunicar de forma não interativa.
No projeto desenvolvido, foi programado o robô NAO para realizar uma dança ao som da música "Thriller" do Michael Jackson. Utilizando o software Choregraphe, foram criados os movimentos coreografados que incorporam os icônicos passos de dança do Michael Jackson. A música foi importada para o Choregraphe e sincronizada com os movimentos da coreografia. Durante a apresentação, o robô NAO reproduz a música através de seu alto-falante embutido, criando uma experiência imersiva. Além disso, foi utilizado o bloco "Say" para que o robô pudesse falar, e ao final da dança, o robô NAO acrescenta um toque de humor ao expressar que está cansado.
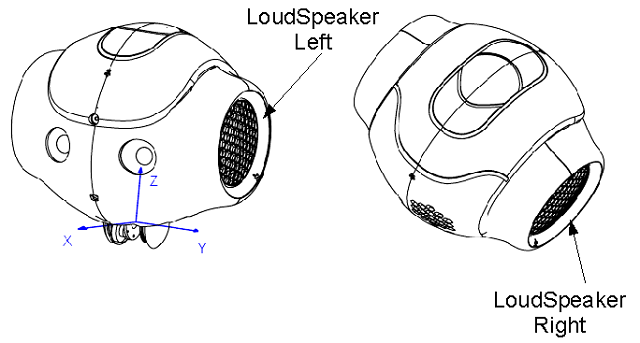
Para a implementação dessa atividade foram utilizados os alto falantes do NAO além de uma série de motores distribuídos em suas articulações, permitindo uma ampla gama de movimentos fluidos e realistas. A imagem abaixo detalha melhor a localização dos alto-falantes.
O vídeo mostrando os testes do programa implementado pelo Grupo pode ser acessado pelo seguinte link: https://www.youtube.com/watch?v=a8psUZowr4M
Na figura abaixo está representado o diagrama geral do projeto.

No projeto, foi criado um bloco chamado "thriller" que contém uma sequência de ações relacionadas à dança ao som da música "Thriller" do Michael Jackson. O bloco "thriller" é composto pelos seguintes blocos:
-
Bloco
setVolume: Esse bloco é responsável por definir o volume do áudio reproduzido pelo robô NAO durante a dança. É utilizado para ajustar o volume da música "Thriller" para um nível adequado. -
Bloco
Say: Esse bloco permite que o robô NAO fale uma frase antes de iniciar a dança. -
Bloco
dance_Thriller: Esse bloco contém a sequência de movimentos coreografados para a dança ao som de "Thriller". Utilizando comandos específicos para os motores do robô NAO, os movimentos característicos e icônicos do Michael Jackson são programados e executados. -
Bloco
say: Este bloco é utilizado após a sequência de dança para adicionar uma fala do robô NAO. nesse ponto o robô agradece a atenção de quem prestou atenção na dança. -
Bloco
setVolume: Novamente, esse bloco é usado para ajustar o volume do áudio, restaurando-o para o nível original. -
Bloco
END POSE: Esse bloco define uma pose final para o robô NAO após a conclusão da dança e das ações programadas. Ele é usado para encerrar a performance em uma pose específica ou em uma posição relaxada.
Segue abaixo a imagem do diagrama do bloco Thriller:

Após o diagrama Thriller, tem o bloco "Wipe Forehead" que inclui um bloco Say, onde o robô NAO expressa que está cansado. Esse gesto de "Wipe Forehead" é adicionado para complementar a fala e dar uma expressão visual ao cansaço do robô.

Posteriormente, tem novamente um bloco de END POSE para que o robô volte para posição relaxada e, por fim, um bloco Say para fazer uma brincadeira dizendo que todos os integrantes do grupo merecem passar com SS.
O Código implementado pode ser acessado na pasta Projeto_5 deste repositório.