AVISO!! En construcción, estos días retocaré muchas cosas aunque lo esencial siempre lo tendrás a mano :P
Material recopilado de Xoan Sampaiño, Rafa Couto, XDeSIG, Jorge Lobo Martínez y mgesteiro
Web oficial del robot escornabot http://escornabot.com
Vamos a describir uno tras otros todos los pasos a seguir para montar la versión DIY (la de los cablecicos)
| Descripción | imagen | archivo |
|---|---|---|
| Sujeción bola v2 |  |
ballcaster-v2.stl |
| Sujeción batería |  |
battery-bracket.stl |
| Sujeción motores |  |
MotorBracket.stl |
| Sujeción protoboard 170 puntos |  |
board-bracket.stl |
| Sujeción placa botonera |  |
Addon-KeypadBracket-PCB.stl |
| Rueda izquierda |  |
wheel-l.stl |
| Rueda derecha |  |
wheel-r.stl |
En mi caso, no monto la pieza "sujeción interruptor". Dejo los cables para conectar macho con hembra y enseñar a los peques la conexión de los cables.
| Descripción | Imagen | Archivo |
|---|---|---|
| Sujeción interruptor |  |
Addon-SwitchHolder.stl |
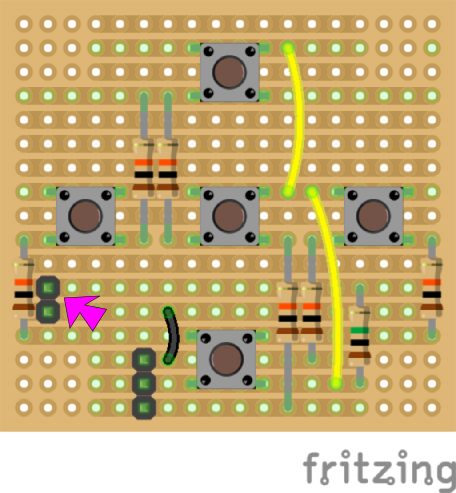
Es la parte más problemática y tienes dos opciones:
Tienes todos los detalles en la web del proyecto pincha aquí
También la tienes documentada en la guía del CFR Ferrol
2.1.2. Versión de XDeSIG

La puedes pedir aquí - Placa XDeSIG en PCBWay
Estos son los materiales que necesitas soldar en la placa:
- 5 resistencias 10k
- 1 resistencia 22k
- Pines acodados
- 5 botones 12mm (también puedes poner los pequeños)
También tiene carcasa :)
| Descripción | Imagen | Archivo |
|---|---|---|
| Sujeción placa botonera XDeSIG |  |
Addon-KeypadBracket-5Buttons.stl |
| Cubierta botonera XDeSIG |  |
Addon-KeypadCover.stl |
| Botones XDeSIG |  |
Addon-KeypadButtons-Graphics.stl |
*Recuerda, una vez montada tienes que comprobar y configurar las lecturas de la botonera
2 – Motores paso a paso 28BY J-48 con “placa” drive ULN2003
2 – Juntas tóricas de 63x60x3 (para las ruedas)
1 – Arduino Nano Atmega328 (También puedes usar un Arduino Pro-Mini)
1 – Zumbador o Buzzer de 5V
1 – Protoboard pequeña de 170 puntos
1 – Portapilas de cuatro unidades para pilas AA (no confundir con las AAA que son las finitas)
20 – Cables arduino macho-hembra (te van a sobrar pero más vale prevenir)
2 – Cables arduino macho-macho (para la conexión pilas-protoboard)
16 – Tornillos M3 (a mi me gustan con la punta para destornillador de estrella)
2 – Tuercas M3 (para las ruedas)
1 – Canica de 14mm (si te gustan las de la carita, busca “bola 14mm smile”)
Si eres curios@ y quieres comprarlos por tu cuenta estoy creando una lista de componentes
Puedes consultar la guía de montaje en la página oficial.
También te sirve de ayuda si montas la versión Ogaki de abiertocc o la versión v2.12
Ya tenemos todo colocado en su sitio, ahora hay que conectar los diferentes componentes con Arduino NANO. Para eso puedes seguir la guía de cableado
Si es la primera vez que utilizas Arduino lo mejor es consultar directamente en la web, instalar el software (IDE) de arduino
Las diferentes programaciones las puedes encontrar en el repositorio de Rafa Couto en GitHub
Algunas cosas importantes que debes seleccionar antes de compilar y cargar la programación en tu arduino NANO:
- Selecciona la placa Arduino NANO (o la que uses)
- El procesador que usa (si es el 164 o 328)
- Puerto COM del PC al que lo tienes conectado
Ya lo he comentado antes, pero este paso se suele olvidar y es uno de los que más quebraderos de cabeza causa. Yo hago la comprobación una vez montado el robot entero, pero tu puedes hacerlo cuando quieras.
Comprobación y configuración de las lecturas de la botonera
Anota los valores de cada botón para editarlos en el archivo configuration.h
Si todo ha ido bien, el pequeñajo tiene que empezar a caminar. Cuando te familiarices un poco con Arduino puedes probar a tocar la programación, cambiar los giros, la velocidad, los sonidos del buzzer, añadir sensores, ponerle bluethoot, wifi y todo lo que se te ocurra.
A continuación tienes unos recursos extra :)
Bluetooth y manejo mediante app android Jorge Lobo Martínez
Puedes ponerle Bluetooth a tu escornabot. Solo necesitas leer el artículo de Jorge en su blog https://ceipmiskatonic.blogspot.com.es/2015/07/usando-el-escornabot-por-bt.html
MUWI uso mediante Wifi con módulo ESP-01 mgesteiro
Con la placa escornabot v 2.12 va muy bien, con la versión DIY todavía no he probado.
De todos modos, os dejo el enlace al repositorio de Miguel donde podeis encontrar toda la información para que lo tengáis a mano. https://github.com/escornabot/esp-muwi
Guía de montaje del CFR Ferrol, es en la que me basé para montar mi primer escornabot. Tienes instrucciones detalladas para montar la botonera - Guía montaje CFR Ferrol
Listado completo de materiales necesarios, web original escornabot. Todos los componentes que te haran falta para poner al pequeñajo a caminar - Listado materiales
Guía de montaje sin incluir ensamblaje de botonera, web original escornabot - Guía montaje
Como comprobar la lectura de la botonera para luego modificar los valores en el archivo "configuration.h" - Comprobación botonera
Diferentes versiones de realizadas hasta ahora Versiones arduino para escornabot
En la wiki del proyecto oficial tienes un apartado dedicado a recursos donde puedes encontrar actividades o tableros para escornabot Recursos Wiki Oficial
Un imprescindible es el Blog de Jorge Lobo Martínez, donde comparte las actividades que hace en clase. Te dejo enlace a la sección donde trata cosas de escornabot pero revisa el blog completo porque mola mucho - Blog Lobotic
Puedes disfrazar a tu pequeñajo Disfraz Escornabot
Si tienes cualquier duda puedes abrir un tema en el grupo creado en google y entre todos te ayudaremos :) https://groups.google.com/forum/#!forum/escornabot_users