ROS package to control an autonomous RC vehicle based on Raspberry Pi3.
This development includes of methods self-driving in indoor environment with used SLAM navigation rplidar A2
Authors: Dmitry Devitt, Konovalov Georgy
Maintainer: Dmitry Devitt, [email protected]
Affiliation: Raccoonlab, Rirpc Sfedu

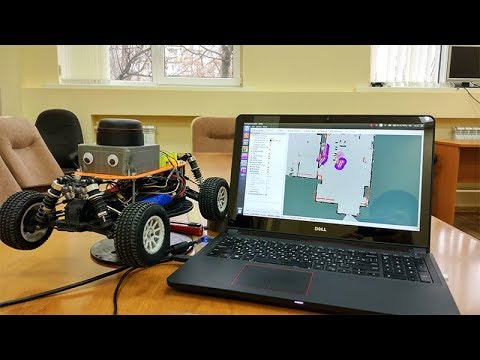
In current version, the platform has a lidar rplidar A2 and gyro MPU6050 (optional).
- remote controll via ros_node
- ros_node for remote controll with joystick
- hector_mapping SLAM
- added Imu data from gyroscope MPU6050
- added AMCL
- added Imu data from flight controller (cc3d via mavros)
- added support teb_local_planner
- added pose controller
- swarm control: swarm-control branch
- added px4 navigation
- add odometry using optical encoders (optional)