生成车载环视相机拼接鸟瞰图
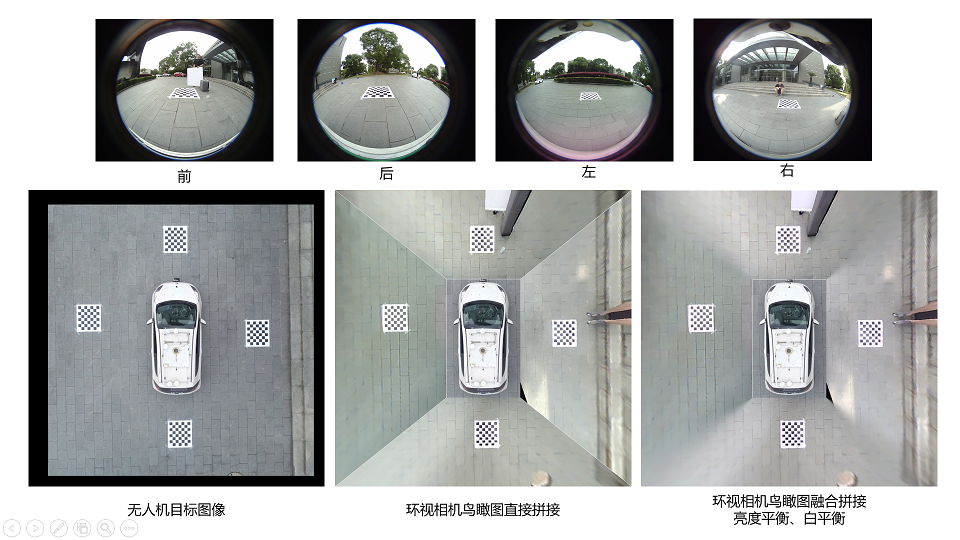
输入前后左右四张原始相机图像,生成鸟瞰图 包括直接拼接和融合拼接,并可以进行亮度平衡和白平衡
将四个相机的K、D、H参数文件以及原始相机图片分别存在data下的四个文件里(如默认文件所示)
在命令行中运行
python surroundBEV.py
可以通过argparse输入更多参数,使用-h或--help 查看所有参数信息,请注意各参数的默认值
python surroundBEV.py -h
| Argument | Type | Default | Help | 备注 |
|---|---|---|---|---|
| -fw | int | 1280 | Camera Frame Width | 相机原始图像宽度 |
| -fh | int | 1024 | Camera Frame Height | 相机原始图像高度 |
| -bw | int | 1000 | Chess Board Width (corners number) | 最终鸟瞰图宽度 |
| -bh | int | 1000 | Chess Board Height (corners number) | 最终鸟瞰图宽度 |
| -cw | int | 250 | Camera Frame Width | 车辆图片宽度 |
| -ch | int | 400 | Camera Frame Height | 车辆图片高度 |
| -fs | float | 1 | Camera Undistort Focal Scale | 去畸变时的焦距缩放系数 |
| -ss | float | 2 | Camera Undistort Size Scale | 去畸变时的尺寸缩放系数 |
| -blend | bool | False | Blend BEV Image (Ture/False) | 鸟瞰图拼接是否采用图像融合 |
| -balance | bool | False | Balance BEV Image (Ture/False) | 鸟瞰图拼接是否采用图像平衡 |
注意:上述参数设置及对应文件仅针对于示例的环视图像拼接,若要用于自己的相机等,请依次完成内外参标定各步骤,得到对应文件进行替换
请确保这里的所有参数设置都与内外参标定和去畸变时一致! (尤其是去畸变系数)
车辆图片可以自行更换,调整为合适的尺寸大小并同步更改args中的参数-cw -ch
通过设置-blend和-balance参数为(True/False)可以启用图像融合和图像亮度色彩平衡操作,
或者在初始化BevGenerator类时,直接传入参数,如
bev = BevGenerator(blend=True, balance=True)
对于实时环视鸟瞰图生成,推荐调用BevGenerator类实现,实时读入前后左右四个相机图像并传入函数得到鸟瞰图
from surroundBEV import BevGenerator
bev = BevGenerator() # 初始化环视鸟瞰生成器
surround = bev(front,back,left,right) # 输入前后左右四张原始相机图像 得到拼接后的鸟瞰图
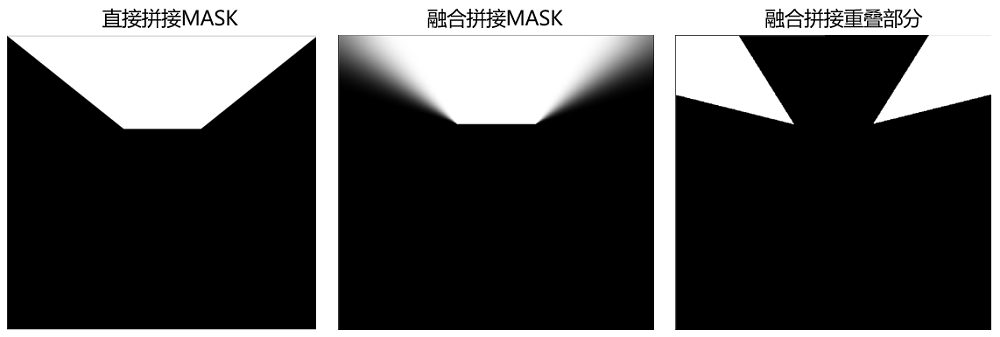
拼接时使用预设的MASK,根据中间车辆图片的尺寸计算
直接拼接时,取车辆图片四个角与鸟瞰图四个角连线得到对应的mask,
融合拼接时,则取更大的区域使得各mask之间有重叠部分,在重叠区域内根据距离两个mask的距离计算权重
如下图所示(以前视图mask为例):
拼接结果:
2021.6 ZZH